Product number:
PROD327
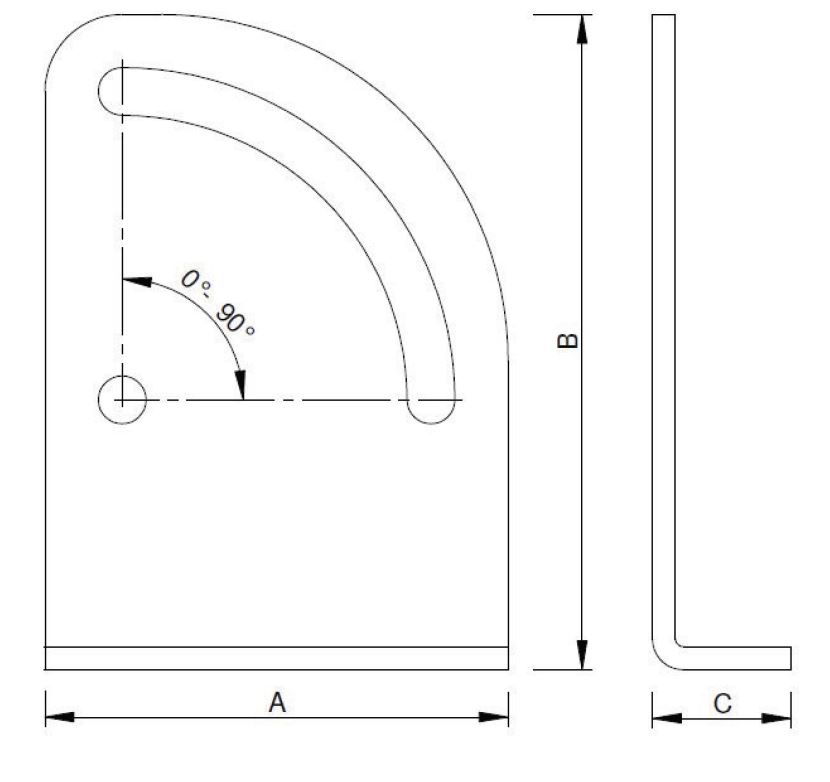
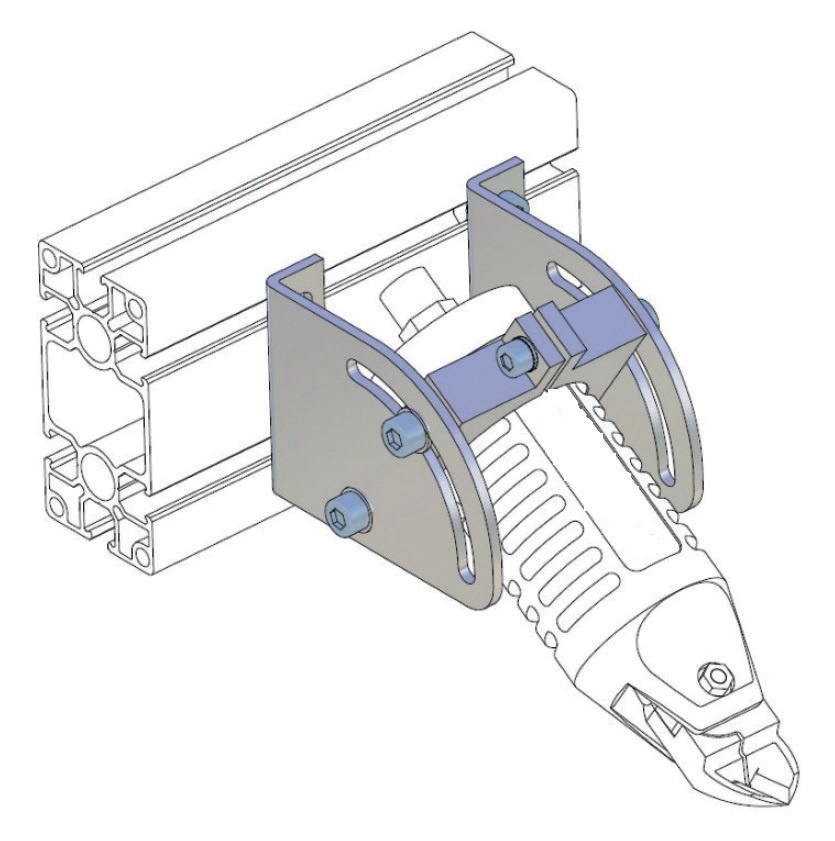
Swivel Mounting Bracket for Air Nippers - Part B
- Roborex
Files
Images







Specification
Material: Zinc plated steel.
Product number:
Material: Zinc plated steel.